SPCraft6 Buque de superficie no tripulado (USV)
SPCraft6 es un buque de superficie no tripulado (USV) de calidad profesional desarrollado por Guangzhou Spherefix Navigation Technology Co. Ltd. Con un casco compuesto de alta resistencia de 1,3 metros, ofrece una capacidad de carga útil y una estabilidad excelentes, y admite la integración simultánea de un sonar multihaz, un ADCP, sensores de calidad del agua y otros instrumentos a gran escala, funcionando como un laboratorio acuático móvil. Equipado con la plataforma de control inteligente iSail, de desarrollo propio, el SPCraft6 permite flujos de trabajo integrales, desde la planificación de misiones y el funcionamiento autónomo hasta el procesamiento de datos, lo que lo hace ideal para levantamientos hidrográficos, investigación hidrológica, vigilancia medioambiental y misiones de búsqueda y rescate.


Spcraft6 Unmanned Surface Vesselusv Key Characteristics

Seguridad y protección inteligente multicapa

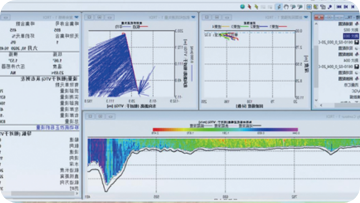
Plataforma de datos inteligente

Integración y ampliación avanzadas de sensores

Hardware de larga duración y alta fiabilidad
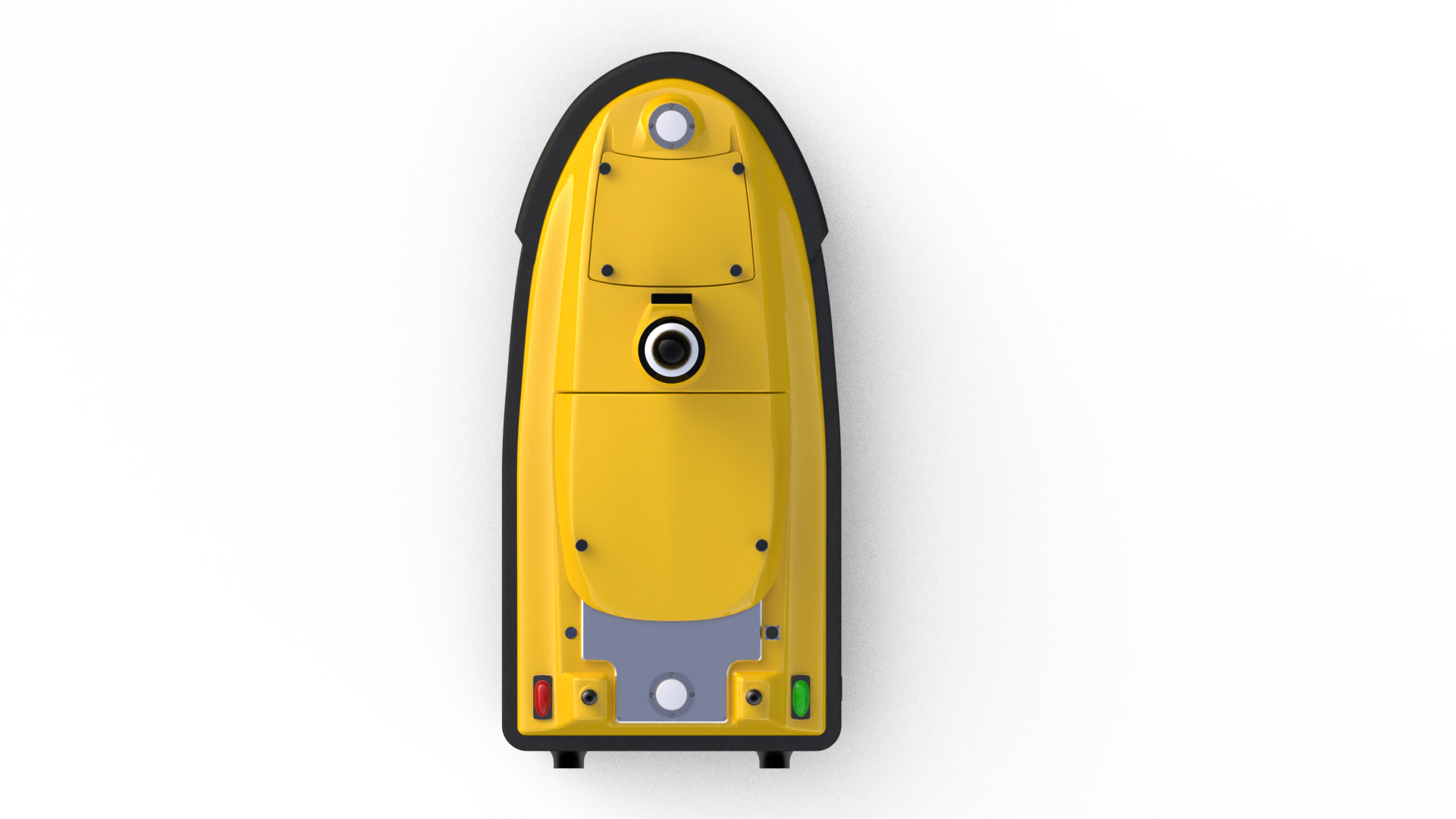
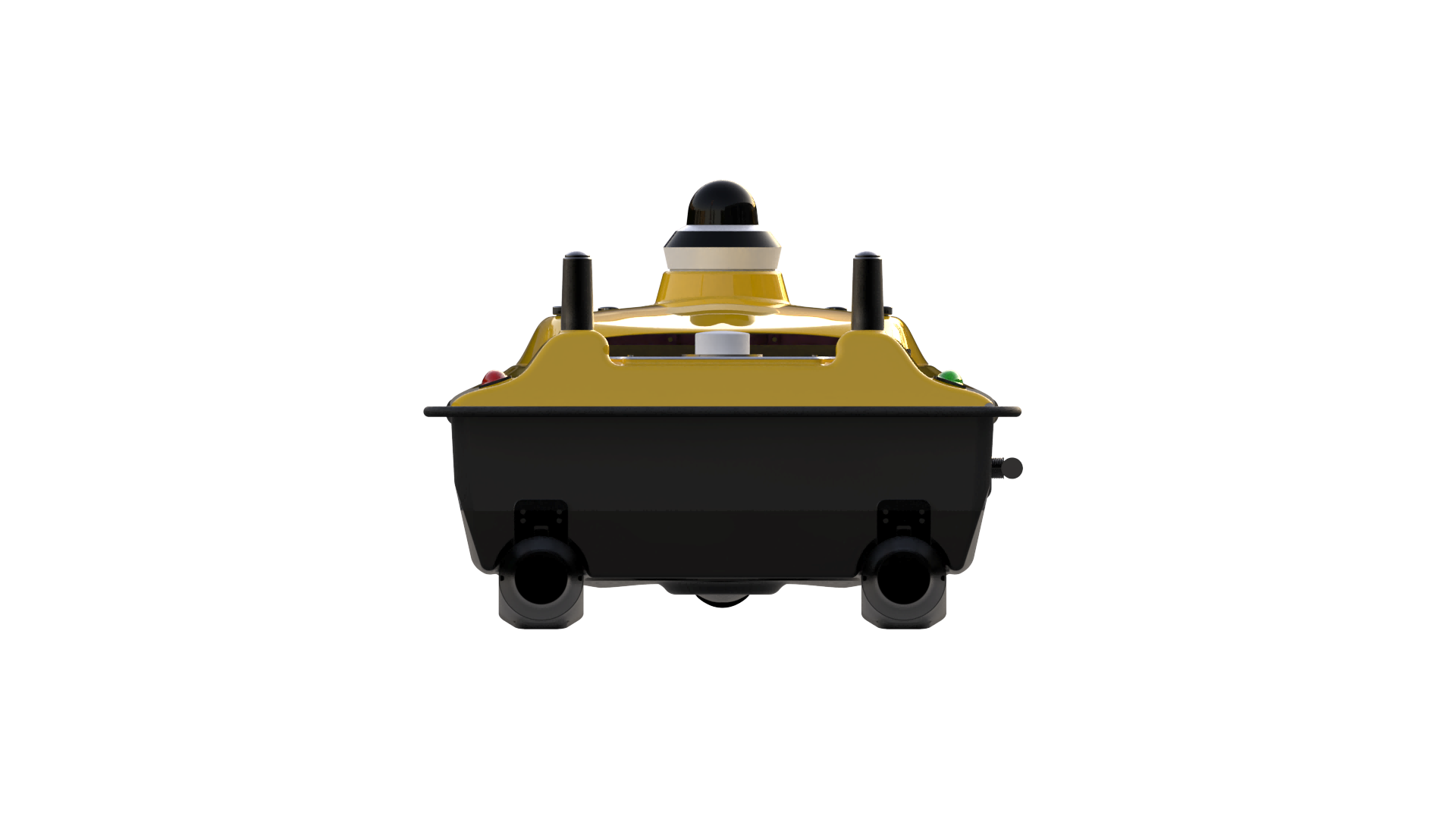
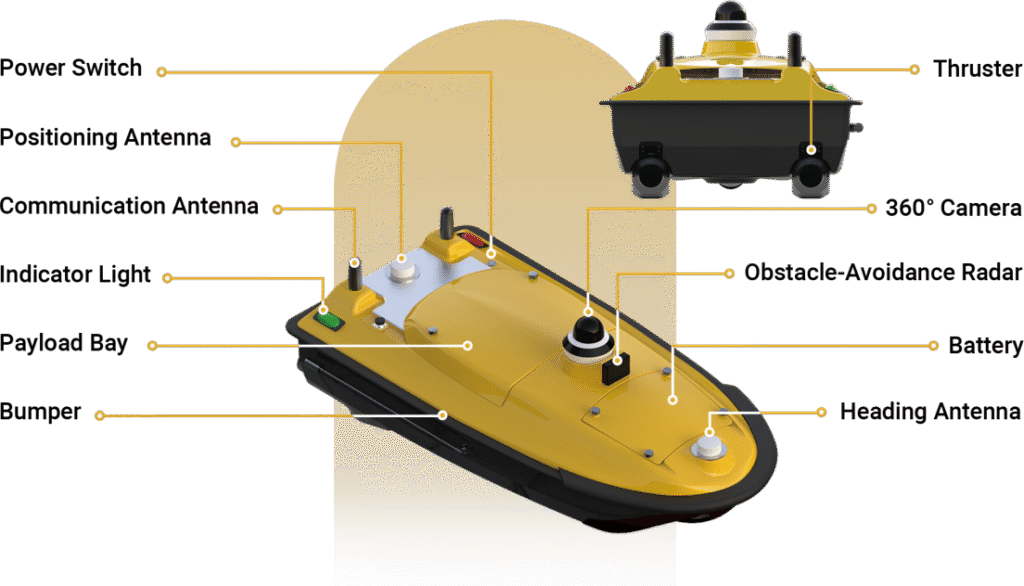
COMPOSICIÓN DEL SISTEMA
Spcraft6 Unmanned Surface Vesselusv Additional Features
")
Alcanza una precisión de ±8 mm con soporte multiconstelación.
Incorpora GNSS de doble antena y sensores de actitud para un rendimiento fiable.
")
Diseño de fácil mantenimiento: Propulsión enchufable y baterías intercambiables en caliente.
Portátil y potente: estructura ligera de 12 kg con capacidad de carga útil de 50 kg.
")
12″ Touch Terminal: Bright display, ��hour battery with fast charge.
Controles físicos: Botones, joysticks duales, rueda de cámara.

Conectividad versátil: 4G/2.4G/UHF con modos manual/automático/vuelo/seguimiento.
Gestión inteligente: Diagnósticos y alertas integrados para una supervisión automatizada.
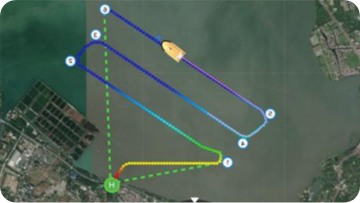
ESCENARIO DE APLICACIÓN

Profundidad del agua Medición
Calidad del agua Muestreo

Calidad del agua Control

Inspección de superficies
Topografía submarina
")
")


