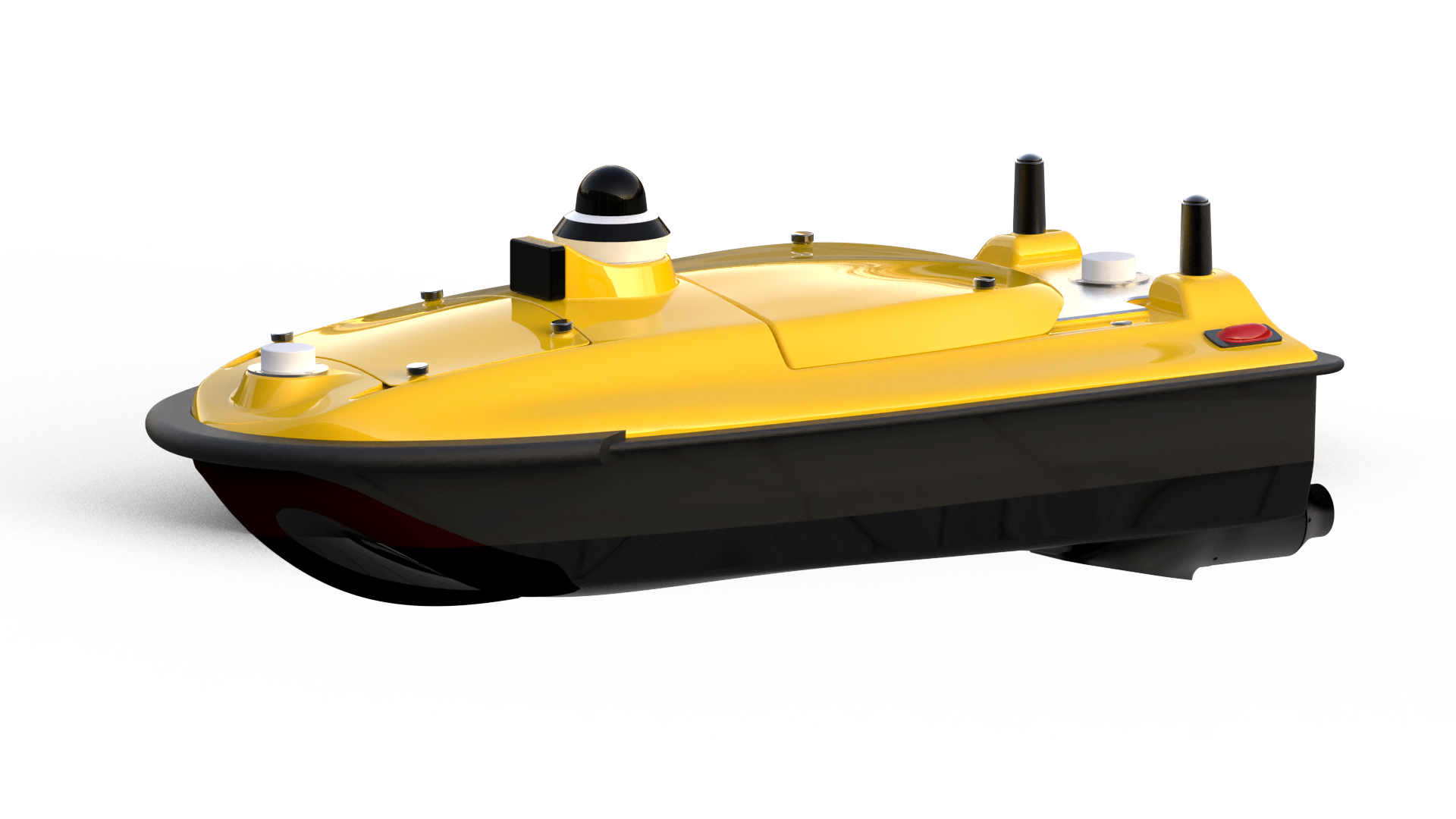
SPCraft6 Navire de surface sans pilote (USV)
Le SPCraft6 est un navire de surface sans pilote (USV) de qualité professionnelle développé par Guangzhou Spherefix Navigation Technology Co., Ltd. Doté d'une coque composite à haute résistance de 1,3 mètre, il offre une capacité de charge utile et une stabilité excellentes, permettant l'intégration simultanée d'un sonar multifaisceaux, d'un ADCP, de capteurs de qualité de l'eau et d'autres instruments à grande échelle, servant ainsi de laboratoire mobile sur l'eau. Alimenté par la plateforme de contrôle intelligente iSail développée par l'entreprise elle-même, le SPCraft6 permet des flux de travail de bout en bout, de la planification de la mission au traitement des données en passant par le fonctionnement autonome, ce qui le rend idéal pour les levés hydrographiques, la recherche hydrologique, la surveillance de l'environnement et les missions de recherche et de sauvetage.

CARACTÉRISTIQUES

Sécurité et protection intelligentes multicouches

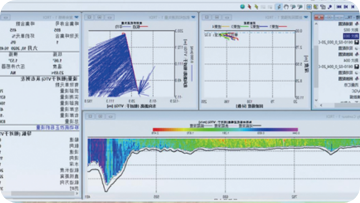
Plate-forme de données intelligente

Intégration avancée des capteurs et évolutivité

Matériel à longue durée de vie et haute fiabilité
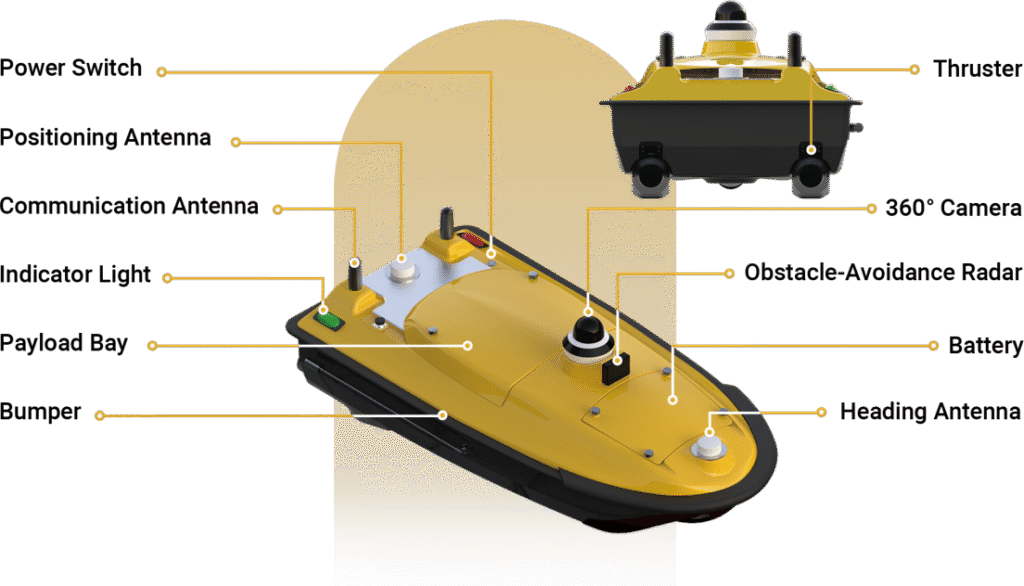
COMPOSITION DU SYSTÈME
AUTRES CARACTÉRISTIQUES
")
Précision de ±8 mm grâce à la prise en charge de plusieurs constellations.
Les capteurs GNSS et d'attitude à double antenne garantissent des performances fiables.
")
Conception facile à entretenir : Propulsion branchée et batteries remplaçables à chaud.
Portable et puissant : structure légère de 12 kg avec une capacité de charge de 50 kg.
")
Terminal tactile 12″ : Écran lumineux, batterie de 8 heures avec charge rapide.
Commandes physiques : Boutons, double joystick, molette de la caméra.

Connectivité polyvalente : 4G/2.4G/UHF avec modes manuel/auto/hover/tracking.
Gestion intelligente : Diagnostics et alertes intégrés pour une surveillance automatisée.
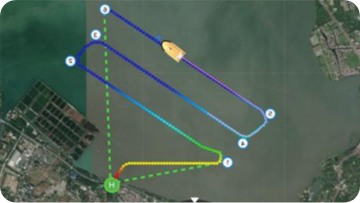
SCÉNARIO D'APPLICATION

Profondeur de l'eau Mesure de la profondeur de l'eau
Qualité de l'eau Échantillonnage

Qualité de l'eau Surveillance de la qualité de l'eau

Inspection de la surface
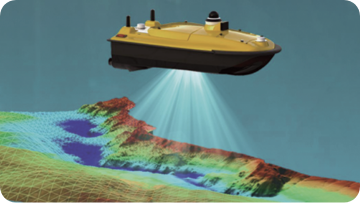
Levés sous-marins
")
")


